
Process
Workflow Features
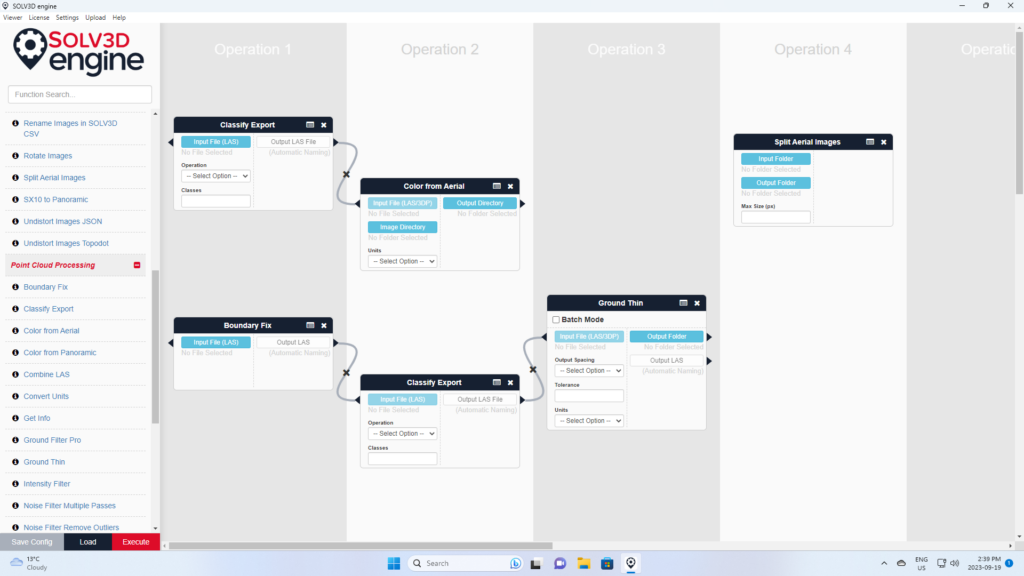
Engine provides a powerful workflow interface for processing a variety of data. Just find the function that you need to use and drag it into the workflow pane. You can add as many functions as you like, and chain them together so that one function uses the output of another function. You can save this workflow as a template for use on other data at a later time.
Automate and customize your workflow by using Engine’s Command Line feature, or add your own processing function using the Third Party module feature.
Engine also offers:
- An optional offline mode- no internet connection required.
- Automatic GPU identification.
- Third-party function calls.
- Command line calls.
- Create, save, and load workflows.
- Offline use – optional.
Processing
With over 80 processing functions for your imagery and point cloud data, Engine will help you get your geospatial data in great shape.
Image Processing
- Add a border to panoramic imagery.
- Add a watermark.
- Cubemap to Panoramic DTM points.
- Exif from images.
- Generate ortho world file.
- Ortho to Google Map tiles.
- Planar to Panoramic.
- Reduce image positions in SOLV3D CSV.
- Rename Images in SOLV3D CSV.
- Rotate images.
- Split aerial images.
- Undistort images.
Point Cloud Processing
- Boundary fix.
- Export classification.
- Classification refinement.
- Classification from aerial and panoramic imagery (with the optional deep learning analytics module).
- Clipping: avoid shape.
- Clipping: clip to radius.
- Clipping: to shapefile.
- Clipping: manual.
- Color from aerial and panoramic imagery.
- Combine LAS.
- Convert units.
- E57 file verify.
- Get info: LAS.
- Ground classify.
- Ground thin.
- Intensity filter.
- Manual edit: delete or classify.
- Noise filter: multi-pass.
- Noise filter: remove outlier.
- Offset scale fix.
- Projection change.
- Reclassify LAS.
- Sampling.
- Scale Attributes.
- Thin.
- Tile grids.
- Transform.
Data Conversion
- 3DP to LAS.
- Combine CSVs.
- Delaunay Mesh.
- E57 to Image.
- E57 to LAS.
- E57 to Scan Position CSV.
- E57 to XML.
- LAS to 3DP.
- LAS to LAZ.
- LAS to Panoramic.
- LAS to Planar.
- LAS to PTX.
- LAS to SOLV3D Streamable Point Cloud.
- LAS to TXT.
- LAZ to LAS.
- Ortho to Google Map Tiles.
- Panoramic Orientation to SOLV3D CSV
- Panoramics to SOLV3D Streamable Image.
- Planar CSV to SOLV3D CSV.
- PTX to Image/LAS/CSV.
- PTX to LAS.
- Re-project SOLV3D CSV.
- TXT to LAS.
- ZFS to Image/LAS/CSV.
Image-Point Cloud Data Aligner (Optional)

We designed the advanced data aligner module to solve the problem of misalignment between the point cloud and images. If the collection system is not properly compensating for the relative rotation and offset between the camera and the laser sensor, then this sort of problem will come up. We often refer to the system offset error as the lever-arm error and refer to the systematic rotation error as boresight error.
The data aligner module assumes that the offset and rotation error are systematic errors.The aligner determines these errors and then compensates for them by correcting the image position and rotations.
The user selects at least five common points between the point cloud and the image and enters those into the module. The module then calculates the error and the correction factor. The user can correct the loaded data set and can also save the correction factor for use in other data sets.
Custom Development and Deep Learning Support
We can adapt Engine to solve a particular problem that you have. Whether you need a specific tool in your workflow, a custom feature or something to meet your stakeholders needs, we are here for you. Our team of geospatial developers and subject matter experts build industry leading technology that meets the needs of many, but we understand that you might have a specific need or requirement to meet your needs. With our in-house deep learning expertise, our team can help you assess your data, develop training data, and then train your model.