
SOLV3D engine™ Quick Start Guide
Installation
- Download and run the latest version of the SOLV3D engine (Engine) installer from https://solv3d-engine.s3.us-west-2.amazonaws.com/SOLV3D+engine+Setup.exe
- A dialog may appear prompting you to confirm that you wish to install Engine and if you trust the Publisher. If so, please click More Info -> Run anyway.
- The installation wizard will then install Engine to your computer and create a desktop icon.
Activation
To activate Engine, you must have a 32-character license key. If you have lost your key, or are interested in purchasing Engine, please contact support@solv3d.com. If you would like a trial of Engine, visit Engine Trial.
Step 1
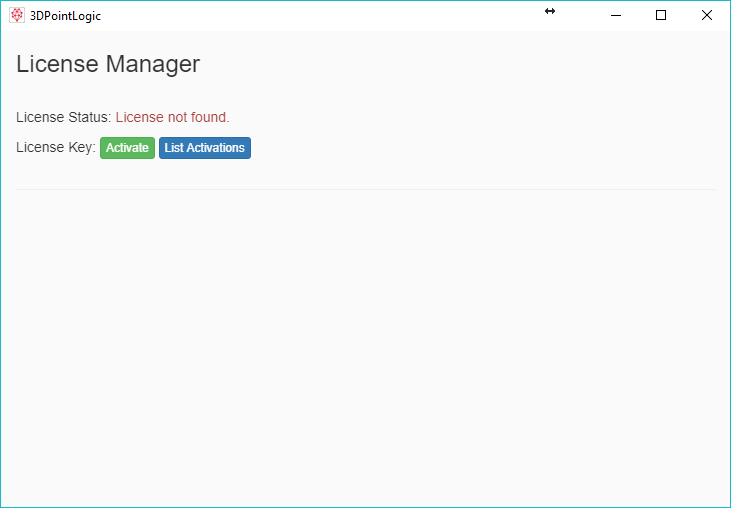
To open the license manager, click “License” -> “Manage” in the top menu bar. The license manager will open in a new window.
Step 2
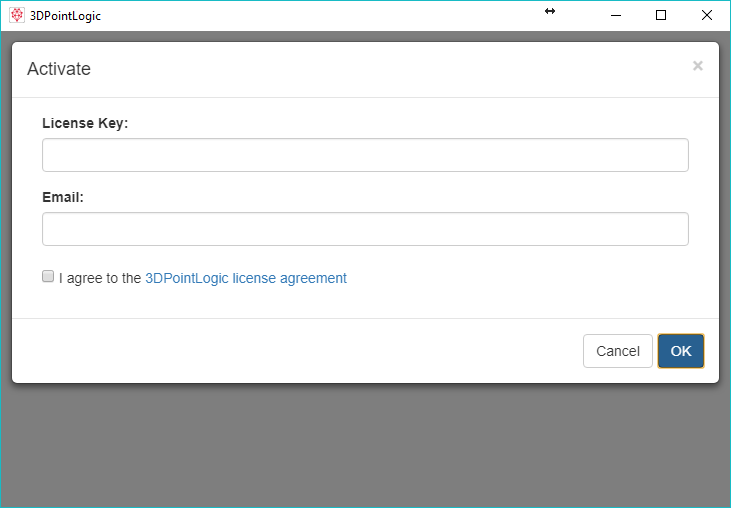
To activate a copy of Engine, click the “Activate” button. A popup window will appear prompting you to enter your license key and email. Ensure these two fields are filled out correctly, then click “OK.”
Step 3
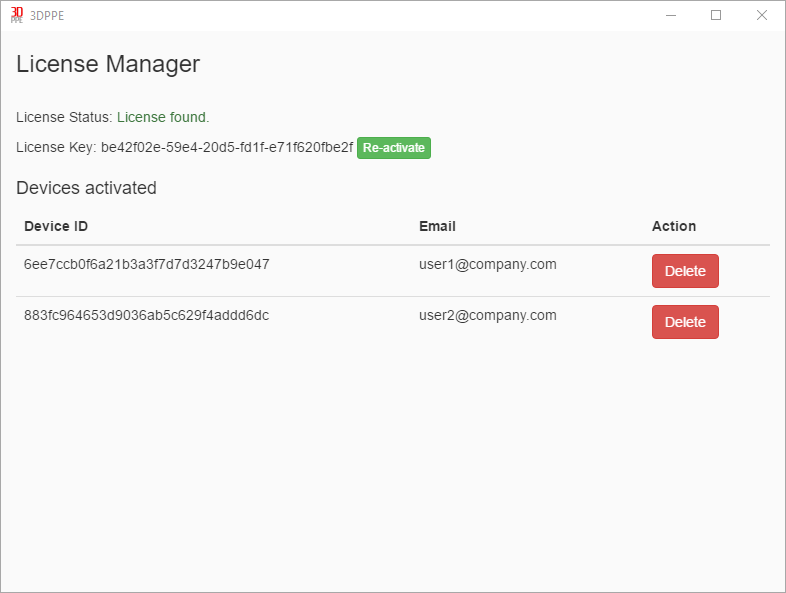
After a few seconds, Engine will be activated, and a list of all currently activated devices associated with your organization will be listed.
Overview
Engine is divided into three major sections: the tools list, the workflow area, and the workflow state buttons.
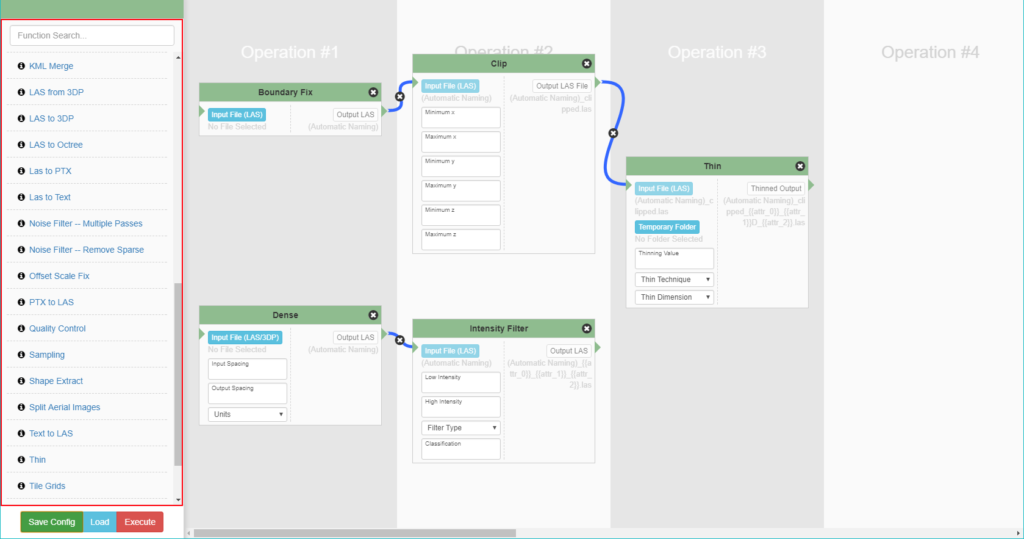
The Function List
The function list is located on the left side of the window, and contains all of the functions which are included with Engine. To learn more about each function, click on the “i” icon to the left of each function name.
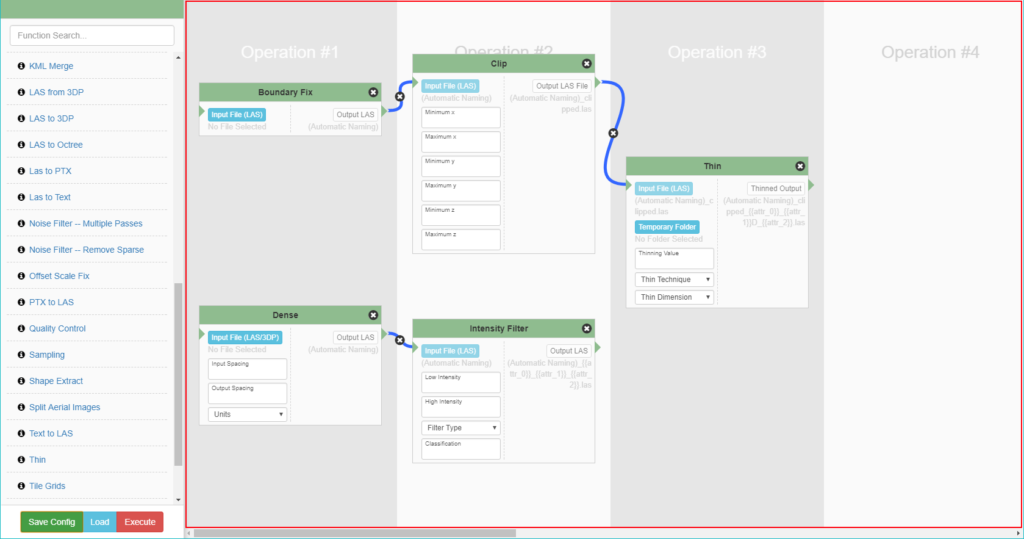
The Workflow Area
The workflow area is located to the right of the functions list, and takes up most of the window. It provides a space to organize tools for various processing jobs.
It is divided into different sections, labelled as “Operation #x,” so that functions can easily be configured to run in succession, allowing the easy visualization of even the most complex workflows.
By default, the workflow area will be empty. To get started, simply click on the function which you wish to run. The function will then appear in the first operation section, and from there it can be dragged right or left to whichever operation section you wish. Up to a maximum of ten sections may be used.
Once two or more functions are included in the workflow, they can be linked by clicking the output arrow of one function , then clicking the input arrow of another tool. Keep in mind that all linked functions must go from left to right. For example, it is possible to link a function in Operation #1 to a function in Operation #2 or anything past that, but it is not possible to link a function from Operation #2 to Operation #1.
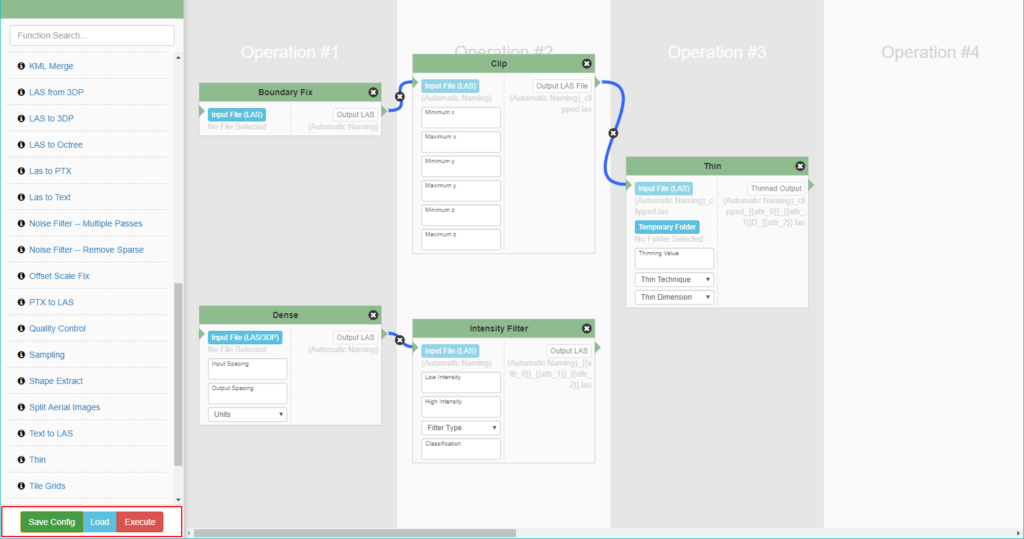
Workflow State
The workflow state buttons are located in the bottom left of the window, right below the tools list. They provide functionality for saving, loading, and executing workflows.
If you have various functions and links arranged on the workflow area which you would like to save for future use, simply click “Save Config.” This will bring up a window prompting you to name and save a “.3dc” file. This file may then be used at a future time to reload your workflow.
To reload a previous workflow, click “Load” and navigate to the “.3dc” workflow file which you would like to load. The functions and links will then appear on the workflow area.
Once your workflow is all setup for the files which you wish to process, click “Execute” to start the functions. Please note that this may take some time depending on the functions which are in the workflow.
Tutorial
This tutorial will take you through a basic use-case of Engine – Separating ground/not-ground in a LAS file and removing noise – while also learning the basics of working with workflows.
Step 1
Select the “Download Files” button below to download a zip file containing a sample LAS file and workflow. Once downloaded, extract the zip file.
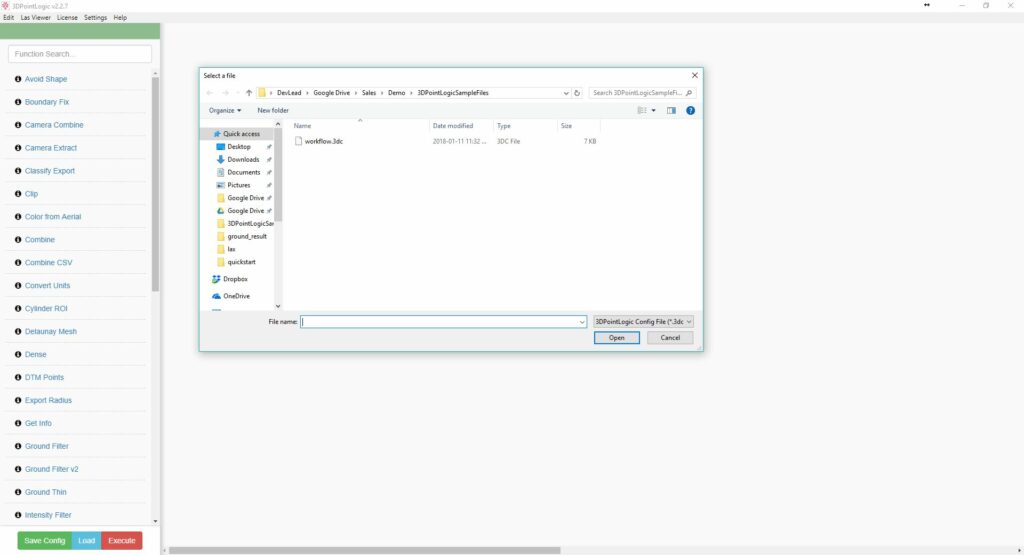
Step 2
In Engine, select the “Load” button at the bottom left of the window. You will then be prompted to select a workflow file. Navigate to the extracted zip folder and select “workflow.3dc.”
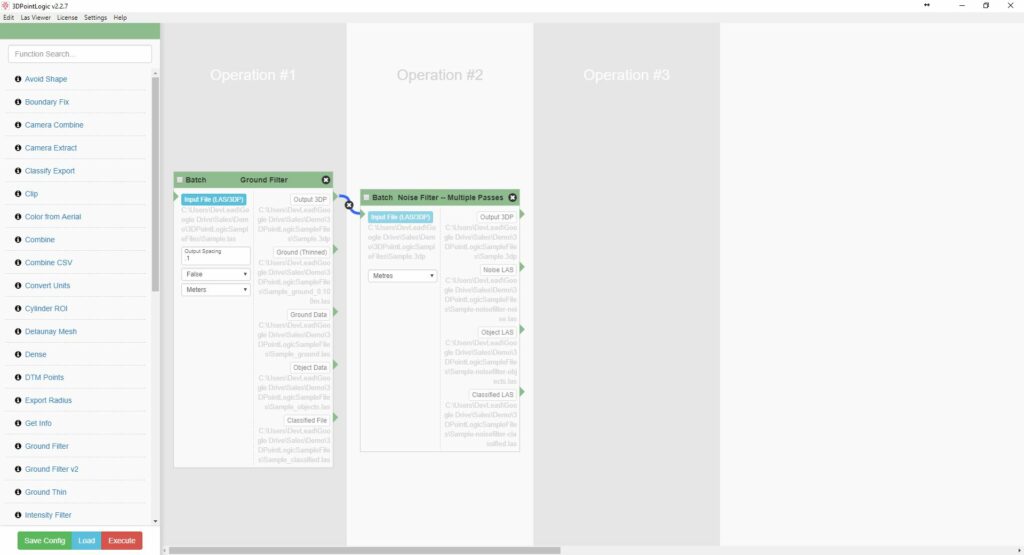
Step 3
Your Engine workflow area should now contain two functions: Ground Filter and Noise Filter — Multiple Passes, with the output 3DP file from Ground Filter being used as the input file for Noise Filter — Multiple Passes.
The Ground Filter function will look at the file and classify each point as either ground or not ground. The Noise Filter — Multiple Passes function will then classify points which change location between different scans as noise, thus removing artifacts such as cars and dust.
To execute this workflow, select the “Input File (LAS/3DP)” button on the Ground Filter function, then navigate to the extracted zip folder and select “Sample.las.” Now, you are ready to execute the workflow. Select the “Execute” button in the bottom left of the window. A popup will appear prompting you to confirm the workflow. Select “Confirm Workflow.”
Step 4
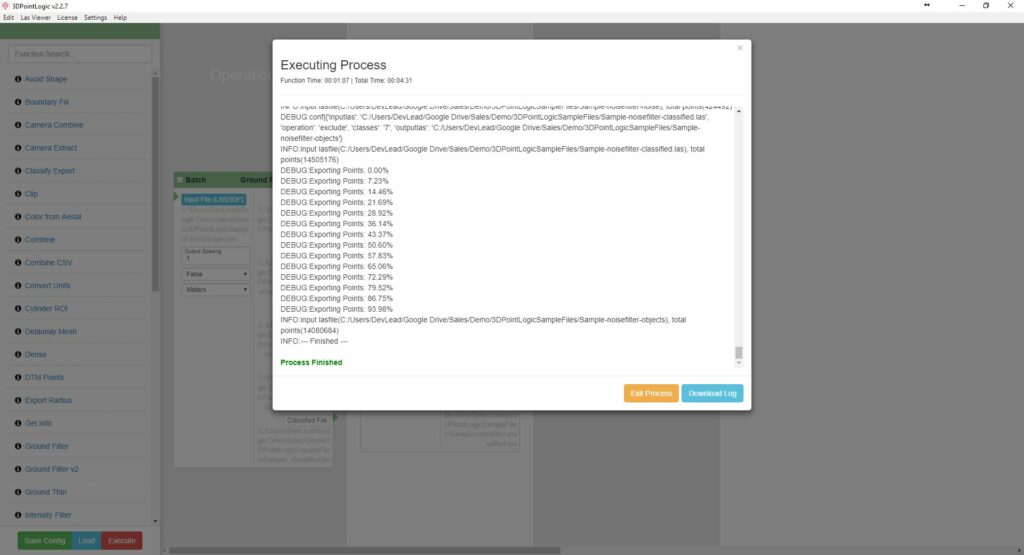
As Engine runs the specified workflow, it will display a log of all the output text. Once the workflow has finished, the log will display a green “Process Finished” text message. At this point, it is safe to close the log window by selecting “Exit Process.”
Step 5
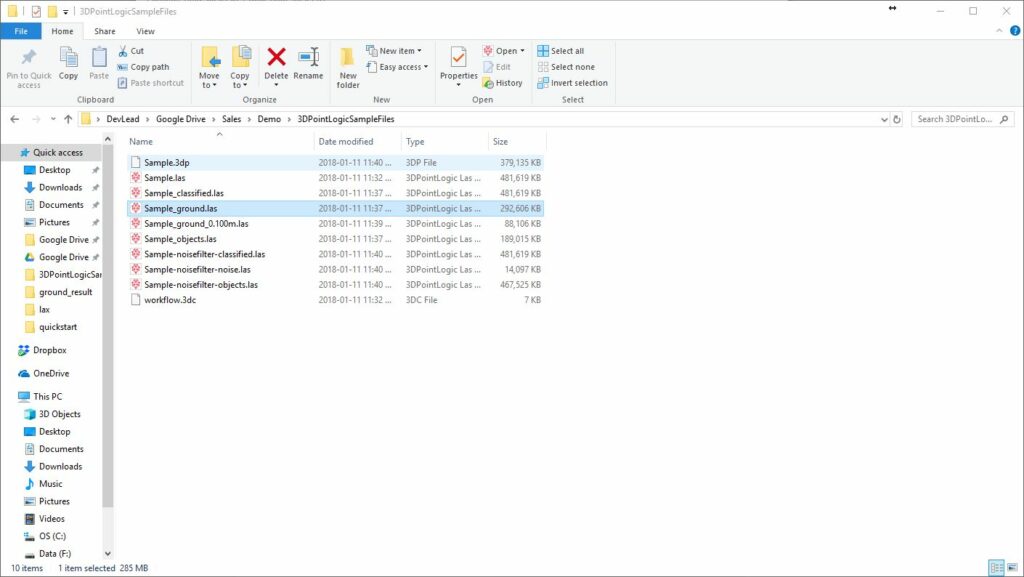
The extracted zip folder should now contain eight new files, which are the results of the workflow:
- Sample.3dp – A proprietary file format used for storing point cloud data, similar to a LAS file.
- Sample_classified.las – The input LAS file with every point classified as ground or not-ground.
- Sample_ground.las – Only the ground points from the input LAS file.
- Sample_ground_0.100m.las – Only the ground points from the input LAS, thinned so that there is a point roughly every 10 centimetres.
- Sample_objects.las – Only the non-ground points from the input LAS.
- Sample-noisefilter-classified.las – The ground classified LAS file with all noise classified as noise.
- Sample-noisefilter-noise.las – Only the noise points from the ground classified file.
- Sample-noisefilter-objects.las – Only the non-noise points from the ground classified file.